NCCL API 解读#
Author by: 刘军
当前使用英伟达 GPU 训练大模型时,PyTorch 等 AI 框架都集成了 NCCL,本节主要介绍如何使用 NCCL 的 API。本节将从六个方面来讲解 NCCL 的相关 API,具体包括 Communicator 生命周期、错误处理和终止、通信容错、集合通信、组间调用和点对点通信。
NCCL 基本概念#
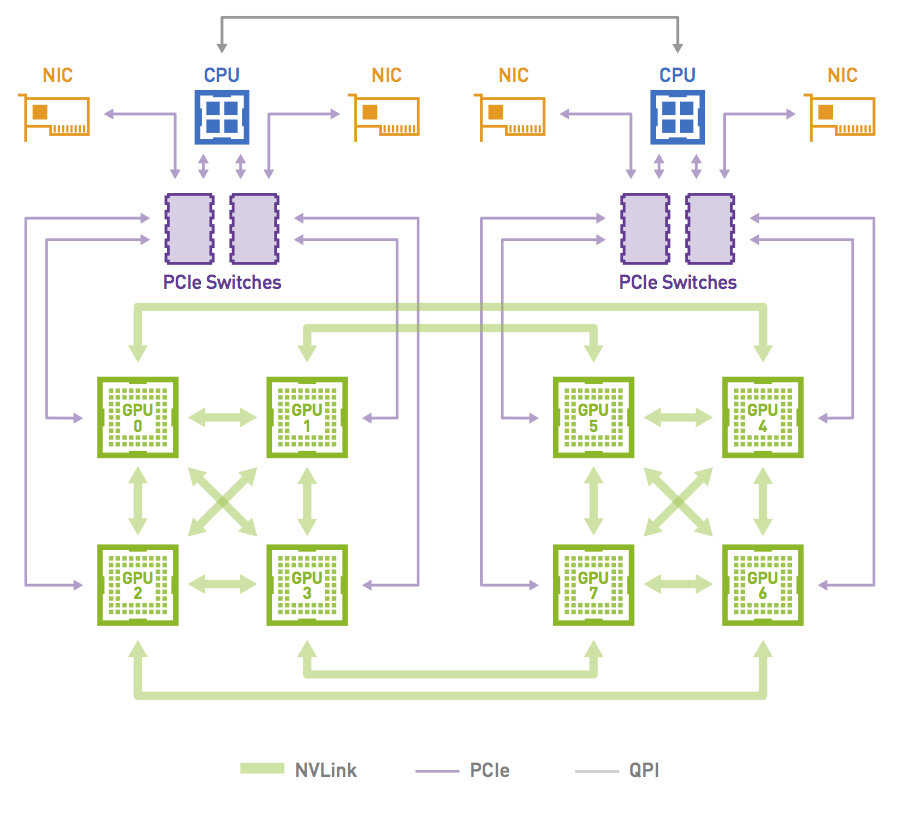
NCCL 是一个通信库,为高性能应用程序提供优化的 GPU 与 GPU 通信。与 MPI 不同,它不提供包含进程启动器和管理器的并行环境。CPU、GPU/NPU 作为最基本的物理设备,再往上是 PCIe、CXL、RoCE 等链路层,然后使用 Ring 或者 Tree 进行拓扑组网,在一定拓扑的基础上有负责数据传输的通信库,集合通信库 NCCL,HCCL 会向上提供通信相关 API,相关 API 会集成在相关分布式加速库或者 AI 框架中。
NCCL 在通信方面发挥着重要的作用:
1 NCCL 可以在多个 GPU 间进行通信,同时 NCCL 支持与 CUDA 流(Streams)集成,实现异步通信和并行计算;
2 在分布式计算中,同步(Synchronization)是至关重要,NCCL 提供各种同步原语,比如使用 barrier 同步,以确保进程在执行集合通信时保持一致的状态;
3 完成通信的性能优化(Performance Optimization),提供集体通信合并、数据传输批量处理、信道拆分、数据拆分、通信与计算并行等优化的方式;
4 NCCL 支持多种集合通信操作(Collective Operations),可以在多个 GPU 或节点间进行数据同步和合并。包括广播(Broadcast)、规约(Reduction)、聚合(Aggregation)、AllReduce、AllGather 等;
5 NCCL 中进程 表示参与通信的计算节点,进程可以组织成组 ,以便在组内进行集合通信;
6 通信者(Communicators)指定参与通信的进程组和具体的通信操作,其定义了一组能够互相发消息的进程,进程中每个进程会被分配一个序号,称作 Rank,进程间显性地通过指定 Rank 来进行通信。
更多详细内容可以参考相关开源实现(NVIDIA/nccl)。
Communicator 的生命周期#
创建单个 Communicator 时需要先使用 ncclUniqueId 为每个 CUDA 设备指定一个 unique rank,然后可以创建 communicator 对象,每个 comminutor 关联固定的 Rank。
同时在创建过程中,使用 ncclGetUniqueId() 创建 unique ID,通过广播的方式发送给所有相关线程和进程,Unique ID 被所有进程和线程共享,让他们进行同步。
ncclResult_t ncclCommInitAll(ncclComm_t* comm, int ndev, constint* devlist) {
//为每个 CUDA 设备指定一个 unique rank
ncclUniqueId Id;
//创建 uniqueId,广播给所有相关线程和进程
ncclGetUniqueId(&Id);
ncclGroupStart();
for (int i = 0; i < ndev; i++) {
cudaSetDevice(devlist[i]);
//创建 communicator 对象,每个 comminutor 关联固定的 rank
//uniqueId 被所有进程和线程共享,让它们进行同步
ncclCommInitRank(comm + i, ndev, Id, i);
}
ncclGroupEnd();
}
同时也支持创建多个 Communicator,使用 ncclCommSplit 对已有 Communicator 进行划分,将其划分成多个 sub-partitions。也可以通过 ncclCommCount 复制一个现有的 Communicator,创建一个拥有更少的 ranks 的单个 communitor。
int rank;
ncclCommUserRank(comm, &rank);
ncclCommSplit(comm, 0, rank, &newcomm, NULL);
也可以将 Communicator 分成两个:
int rank, nranks;
ncclCommUserRank(comm, &rank);
ncclCommCount(comm, &nranks);
ncclCommSplit(comm, rank/(nranks/2), rank%(nranks/2), &newcomm, NULL);
函数需要原始 communicator 中所有 ranks 一起调用,即便是某些 rank 将不再是这个 communicator 一部分,也需要将 color 参数设置为 NCCL_SPLIT_NOCOLOR 来调用。这将创建一个仅具有前 2 个等级的通信器:
int rank;
ncclCommUserRank(comm, &rank);
ncclCommSplit(comm, rank < 2 ? 0: NCCL_SPLIT_NOCOLOR, rank, &newcomm, NULL);
需要注意的是,在使用多个 NCCL Communicator 时需要注意同步,否则会造成死锁。NCCL kernel 会因为等待数据到来而阻塞,在此期间任何 CUDA 操作都会导致设备同步,意味着需要等待所有的 NCCL kernel 完成。NCCL kernel 在等待数据到来期间如果有任何 CUDA operation 进入了队列就会导致死锁,因为 NCCL 也会执行 CUDA 调用,而 NCCL 的 CUDA 调用会进入队列中等待前一个 CUDA 操作执行完毕。
在完成通信之后,ncclCommFinalize 会把一个 communicator 从 ncclSuccess 状态转变为 ncclInProgress 状态,开始完成 background 中的各种操作并与其他 ranks 之间进行同步。
ncclCommFinalize会将所有未完成的操作以及与该 communicator 所属的网络相关的资源会被 flushed 并被释放掉。一旦所有的 NCCL 操作都完成了,communicator 会将状态转换成 ncclSuccess,可以通过 ncclCommGetAsyncError来查询状态。
ncclResult_t ncclCommFinalize(ncclComm_t comm)
一个 Communicator 被 Finalize 之后,下一步就是释放掉它所拥有的全部资源,包括它自己也会被释放。ncclCommDestroy函数会释放掉一个 Communicator 的本地所属资源。
调用 ncclCommDestroy 时候如果对应的 Communicator 的状态是 ncclSuccess,那么可以保证这个调用是非阻塞,否则这个调用可能会被阻塞。会释放掉一个 Communicator 的所有资源然后返回,对应的 Communicator 也不能再被使用。
ncclResult_t ncclCommDestroy(ncclComm_t comm)
Error handling 错误处理#
在实际通信过程中,往往要处理很多错误告警,NCCL 也提供了相关 API,很多其它通信库也专门针对 error 进行了相关定制化场景的处理,本小节主要讲解 NCCL 如何处理相关 error。
所有的 NCCL 调用都会返回一个 NCCL 错误码(error code),如果某个 NCCL 调用返回的 error code 不是 ncclSuccess 或者 ncclInternalError,并且 NCCL_DEBUG 设置为 WARN,NCCL 会打印出 human-readable 的信息来解释内部发生了什么导致该错误的发生。如果 NCCL_DEBUG 设置为 INFO,NCCL 也会打印出导致该错误的调用栈,以便帮助用户定位和修复问题。
int ncclStreamSynchronize(cudaStream_t stream, ncclComm_t comm) {
cudaError_t cudaErr;
ncclResult_t ncclErr, ncclAsyncErr;
while (1) {
cudaErr = cudaStreamQuery(stream);
if (cudaErr == cudaSuccess)
return 0;
if (cudaErr != cudaErrorNotReady) {
printf("CUDA Error : cudaStreamQuery returned %d\n", cudaErr);
return 1;
}
ncclErr = ncclCommGetAsyncError(comm, &ncclAsyncErr);
if (ncclErr != ncclSuccess) {
printf("NCCL Error : ncclCommGetAsyncError returned %d\n", ncclErr);
return 1;
}
if (ncclAsyncErr != ncclSuccess) {
// An asynchronous error happened. Stop the operation and destroy
// the communicator
ncclErr = ncclCommAbort(comm);
if (ncclErr != ncclSuccess)
printf("NCCL Error : ncclCommDestroy returned %d\n", ncclErr);
// Caller may abort or try to create a new communicator.
return 2;
}
// We might want to let other threads (including NCCL threads) use the CPU.
sched_yield();
}
}
Fault Tolerance 容错#
NCC 提供了许多特性来让我们的应用从严重的错误中恢复到正常,比如网络连接失败、节点宕机以及进程挂掉等。当这样的错误发生的时候,应用应该能够调用 ncclCommAbort 方法来释放相应的 communicator 的资源,然后创建一个新的 communicator 继续之前的任务。为了保证 ncclCommAbout 能够在任何时间点被调用,所有的 NCCL 调用都可以是非阻塞(异步)的操作。
为了正确的弃用,当一个 communicator 中任何一个 rank 出错了的时候,所有其他的 rank 都需要调用 ncclCommAbort 来启用它们自己的 NCCL communicator。用户可以实现方法来决定什么时候以及是否弃用这些 communicator 并重新开始当前的 NCCL 操作。
bool globalFlag;
bool abortFlag =false;
ncclConfig_t config = NCCL_CONFIG_INITIALIZER;
/* set communicator as nonblocking */
config.blocking =0;
CHECK(ncclCommInitRankConfig(&comm, nRanks, id, myRank, &config));
do {
CHECK(ncclCommGetAsyncError(comm,&state));
} while(state == ncclInProgress && checkTimeout() != true);
if (checkTimeout() == true || state != ncclSuccess) abortFlag = true;
/* sync abortFlag among all healthy ranks. */
reportErrorGlobally(abortFlag, &globalFlag);
if (globalFlag) {
/* time is out or initialization failed: every rank needs to abort and restart. */
ncclCommAbort(comm);
/* restart NCCL; this is a user implemented function, it might include
* resource cleanup and ncclCommInitRankConfig() to create new communicators. */
restartNCCL(&comm);
}
/* nonblocking communicator split. */
CHECK(ncclCommSplit(comm, color, key, &childComm, &config));
do {
CHECK(ncclCommGetAsyncError(comm, &state));
} while(state == ncclInProgress && checkTimeout() != true);
if (checkTimeout() == true || state != ncclSuccess) abortFlag = true;
/* sync abortFlag among all healthy ranks. */
reportErrorGlobally(abortFlag, &globalFlag);
if (globalFlag) {
ncclCommAbort(comm);
/* if chilComm is not NCCL_COMM_NULL, user should abort child communicator
* here as well for resource reclamation. */
if (childComm != NCCL_COMM_NULL)
ncclCommAbort(childComm);
restartNCCL(&comm);
}
/* application workload */
集合通信 Collective Operations#
集体操作(Collective Operation)需要被每个 rank 都调用,从而形成一次集体的操作。如果失败的话可能会导致其他 rank 陷入无尽的等待。可以参考 NCCL 官方文档提供的相关 API,NCCL 的集合通信函数是分布式训练的核心。AllReduce实现全局同步,Broadcast用于数据分发,Reduce实现中心化聚合,AllGather汇聚所有数据,ReduceScatter则融合归约与块分发。
理解其语义和原位操作条件,是构建高效多 GPU 应用的基础。开发者需根据同步需求(全局同步/中心收集/数据分发)和显存布局选择合适的原语。在分布式深度学习训练中,多 GPU 间高效的数据同步至关重要。NVIDIA 的 NCCL 库为此提供了高性能的集合通信原语,接下来解析其核心函数。
全局归约 (ncclAllReduce)#
所有参与 GPU 将各自 sendbuff中的数据,使用指定操作(如求和 ncclSum)进行全局归约,并将最终相同的结果复制到各自的 recvbuff中。可以实现高效的全局同步(如梯度汇总),当 sendbuff == recvbuff 时触发。
ncclResult_t ncclAllReduce(const void* sendbuff, void* recvbuff,
size_t count, ncclDataType_t datatype,
ncclRedOp_t op, ncclComm_t comm, cudaStream_t stream)
广播 (ncclBroadcast / ncclBcast)#
由指定的 root GPU 将其 sendbuff中的数据完整复制到所有 GPU(包括自身)的 recvbuff中。 用于分发初始数据(如模型权重)。
ncclResult_t ncclBroadcast(const void* sendbuff, void* recvbuff,
size_t count, ncclDataType_t datatype, int root,
ncclComm_t comm, cudaStream_t stream)
ncclResult_t ncclBcast(void* buff, size_t count, ncclDataType_t datatype,
int root, ncclComm_t comm, cudaStream_t stream)
归约 (ncclReduce)#
所有 GPU 将各自 sendbuff中的数据,使用指定操作进行归约,但仅将最终结果存放到指定 root GPU 的 recvbuff中,其他 GPU 的 recvbuff被忽略。中心化收集计算结果。当 sendbuff == recvbuff 时触发(仅在 root 上有意义)。
ncclResult_t ncclReduce(const void* sendbuff, void* recvbuff,
size_t count, ncclDataType_t datatype, ncclRedOp_t op,
int root, ncclComm_t comm, cudaStream_t stream)
全收集 (ncclAllGather)#
每个 GPU 提供长度为 sendcount的数据块。所有 GPU 将这些块按 GPU 序号拼接成一个完整的大数据块(总长度 = GPU 数量 * sendcount),并将这个完整拼接结果存放到各自的 recvbuff中。 汇聚所有 GPU 的局部数据(如收集嵌入向量)。当 sendbuff == recvbuff + rank * sendcount 时触发(需严格满足内存偏移)。
ncclResult_t ncclAllGather(const void* sendbuff, void* recvbuff,
size_t sendcount, ncclDataType_t datatype,
ncclComm_t comm, cudaStream_t stream)
归约散播 (ncclReduceScatter)#
每个 GPU 提供一个大输入数组 sendbuff(长度 = GPU 数量 * recvcount)。首先按元素位置对所有 GPU 的 sendbuff进行归约(例如,所有 GPU 的第 0 个 recvcount块归约在一起,第 1 个块归约在一起...),然后每个 GPU只接收归约后结果中对应于自己序号的那一块(长度为 recvcount),存放到 recvbuff中。融合归约与数据分发,常见于模型并行。当 recvbuff == sendbuff + rank * recvcount 时触发(需严格满足内存偏移)。
ncclResult_t ncclReduceScatter(const void* sendbuff, void* recvbuff,
size_t recvcount, ncclDataType_t datatype,
ncclRedOp_t op, ncclComm_t comm, cudaStream_t stream)
在使用相关 API 时需要注意以下几点要求:
1.多数函数支持输入输出缓冲区重叠(sendbuff和 recvbuff指向相同或特定偏移的内存),节省显存但需严格满足条件。
2.所有操作均关联 cudaStream_t,确保与 CUDA 内核执行的正确同步。
3.调用者需确保缓冲区(sendbuff, recvbuff)已正确分配且在 GPU 显存上。
4.AllGather和 ReduceScatter对输入/输出缓冲区大小有明确要求(nranks * sendcount/recvcount),需严格遵守。
NCCL 组操作原理解析#
在并行计算中,CPU 线程阻塞会严重影响效率,NCCL 的组操作原语 (ncclGroupStart/ncclGroupEnd) 提供了关键的非阻塞协作机制,组函数可以将多个调用合并成一个,其核心功能在于:
+消除 CPU 阻塞:将多个 NCCL 调用(如集合通信或通信器初始化)封装在组操作内,可避免操作间的 CPU 线程同步等待。
+支持多线程并发:不同线程可独立发起各自的组操作,无需互斥锁保护,显著提升多线程程序的并行效率。
组操作开始 (ncclGroupStart)#
ncclResult_t ncclGroupStart();
标记组操作的起始点。调用后,后续所有 NCCL 函数调用(如 ncclAllReduce, ncclCommInitRank 等)将:
-延迟执行:仅记录操作,不立即提交到硬件。
-跳过 CPU 同步:避免操作间不必要的线程阻塞。
组操作结束 (ncclGroupEnd)#
ncclResult_t ncclGroupEnd();
标记组操作的结束点,触发组内操作提交。
-批量提交:将组内累积的所有操作一次性提交到对应的 CUDA 流 (stream)。
-非阻塞返回:函数返回仅表示操作已加入 CUDA 流队列,不保证完成。
-通信器初始化特例:当组内包含 ncclCommInitRank 时,ncclGroupEnd会阻塞等待所有通信器完成初始化。
组操作模拟 (ncclGroupSimulateEnd)#
ncclResult_t ncclGroupSimulateEnd(ncclSimInfo_t *simInfo);
模拟执行组操作,预测通信性能特征。将模拟结果(如算法选择、预期耗时等)写入 simInfo 结构体。
-无实际执行:不进行真实的数据传输。
-性能预分析:用于优化策略选择或资源预估。
典型的工作流程如下,可以避免频繁的 CPU-GPU 同步,释放 CPU 线程处理其他任务。将多个独立操作合并提交,减少启动开销。不同线程可安全调用独立组操作,简化并发设计。结合 ncclCommInitRank 实现多通信器高效创建。通过 ncclGroupSimulateEnd 预判通信成本,优化算法选择。
ncclGroupStart(); // 开始组操作
ncclAllReduce(..., stream1); // 操作 1:加入组 (不阻塞)
ncclBroadcast(..., stream2); // 操作 2:加入组 (不阻塞)
ncclGroupEnd(); // 提交组内所有操作到流
// 此处操作已加入流队列,但 GPU 可能仍在执行
需要注意的是 ncclGroupStart 和 ncclGroupEnd必须成对调用。同时 ncclGroupEnd 返回不保证操作完成,需通过 CUDA 事件或流查询同步。组操作仅作用于当前线程的 NCCL 调用,ncclGroupSimulateEnd 不影响真实通信状态。
NCCL 组操作原语是构建高效异步程序的关键工具。通过将操作封装在 ncclGroupStart 和 ncclGroupEnd 之间,开发者可消除冗余的 CPU 阻塞,实现多操作批量提交与多线程安全调用。配合模拟功能,还能在部署前预判通信性能,为分布式训练提供底层优化支撑。
点对点通信 Point-to-point#
在复杂分布式计算场景中,当 GPU 间需要非对称数据交换(如参数服务器、图计算等),NCCL 的点对点通信(P2P)提供了灵活的数据传输能力。与集合通信不同,P2P 支持任意两个 GPU 间的定向数据流动。NCCL 的点对点通信主要有 ncclSend和 ncclRecv,然后由此组成 One-to-all、All-to-one、All-to-all、Neighbor exchange。
数据发送 (ncclSend)#
将当前 GPU 中 sendbuff 内的 count 个元素发送给指定 peer GPU。在使用该函数时,目标 GPU 必须同步调用 ncclRecv,且 count和 datatype参数需完全一致。在数据被完全发送前,GPU 执行流会阻塞(不阻塞 CPU 线程),sendbuff 需位于 GPU 显存,且发送期间内容不可修改。
ncclResult_t ncclSend(
const void* sendbuff, // 发送数据地址
size_t count, // 数据元素数量
ncclDataType_t datatype, // 数据类型 (如 ncclFloat)
int peer, // 目标 GPU 的通信序号
ncclComm_t comm, // 通信器对象
cudaStream_t stream // 关联的 CUDA 流
);
数据接收 (ncclRecv)#
从指定 peer GPU 接收 count 个元素,存储到当前 GPU 的 recvbuff。参数必须与发送端的 ncclSend 完全匹配(相同 peer、count、datatype)。在数据完全到达前,GPU 执行流暂停。recvbuff 需预先分配足够显存,接收完成前不可访问。
ncclResult_t ncclRecv(
void *recvbuff, // 接收数据地址
size_t count, // 数据元素数量
ncclDataType_t datatype, // 数据类型
int peer, // 源 GPU 的通信序号
ncclComm_t comm, // 通信器对象
cudaStream_t stream // 关联的 CUDA 流
);
NCCL 点对点通信突破了集合通信的对称性限制,为非常规数据流提供了底层支持。通过 ncclSend/ncclRecv的精确配对和组操作封装,开发者可实现高效的定向数据传输。需要始终警惕参数匹配、死锁规避和 GPU 阻塞三大核心问题,结合拓扑感知与流并行化技术,充分发挥多 GPU 系统的通信潜力。
总结与思考#
NCCL 是一个通信库,为高性能应用程序提供优化的 GPU 与 GPU 通信。NCCL 向开发者提供了集合通信、组操作、点对点通信等相关 API,同时支持错误处理和容错机制,使通信更加高效,同时在使用相关 API 的同时需要遵守相关 API 的规范,以此发挥 NCCL GPU 集群的通信潜力。
内容参考#
NCCL 官方文档(https://docs.nvidia.com/deeplearning/nccl/)