K8S 运行时#
Author by: 何晨阳
前文中已经介绍完如何进行资源管理和调度,完成这些工作后,就需要将调度成功的 Pod 在宿主机中创建出来。这个正是 kubelet 通过 CRI 和底层容器运行时进行交互。
为什么需要抽象出 CRI 这个概念?
首先是统一容器生命周期管理接口,避免 Kubernetes 与特定容器运行时强绑定。支持多种容器运行时(Docker、containered、CRI-O)。其次是社区需要为不同运行时维护多套代码(如 dockershim、rktlet),阻碍生态发展。
CRI 核心组件#
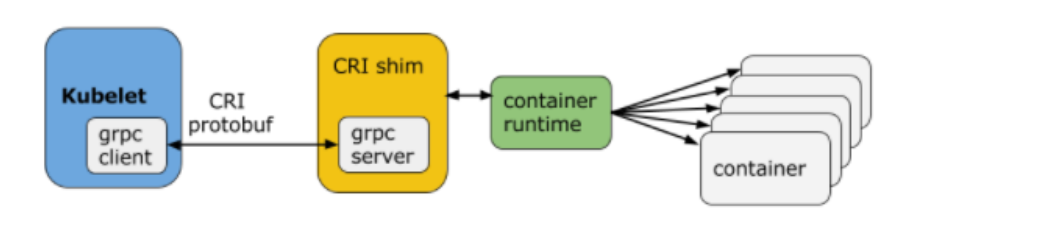
在k8s中,CRI(ContainerRuntimeInterface)的核心组件包括kubelet、CRIshim和ContainerRuntime。它们共同协作,实现容器生命周期的管理。以下是三个组件简要介绍:
kubelet:负责管理节点上的 Pod 和容器,通过 CRI 与容器运行时交互。
CRI shim:实现 CRI 接口的适配层(如 dockershim、containerd-shim),作为 gRPC 服务端负责将 CRI 请求的内容转为具体的容器运行时 API 并响应。
Container Runtime:实际执行容器操作的引擎(如 containerd、CRI-O)。
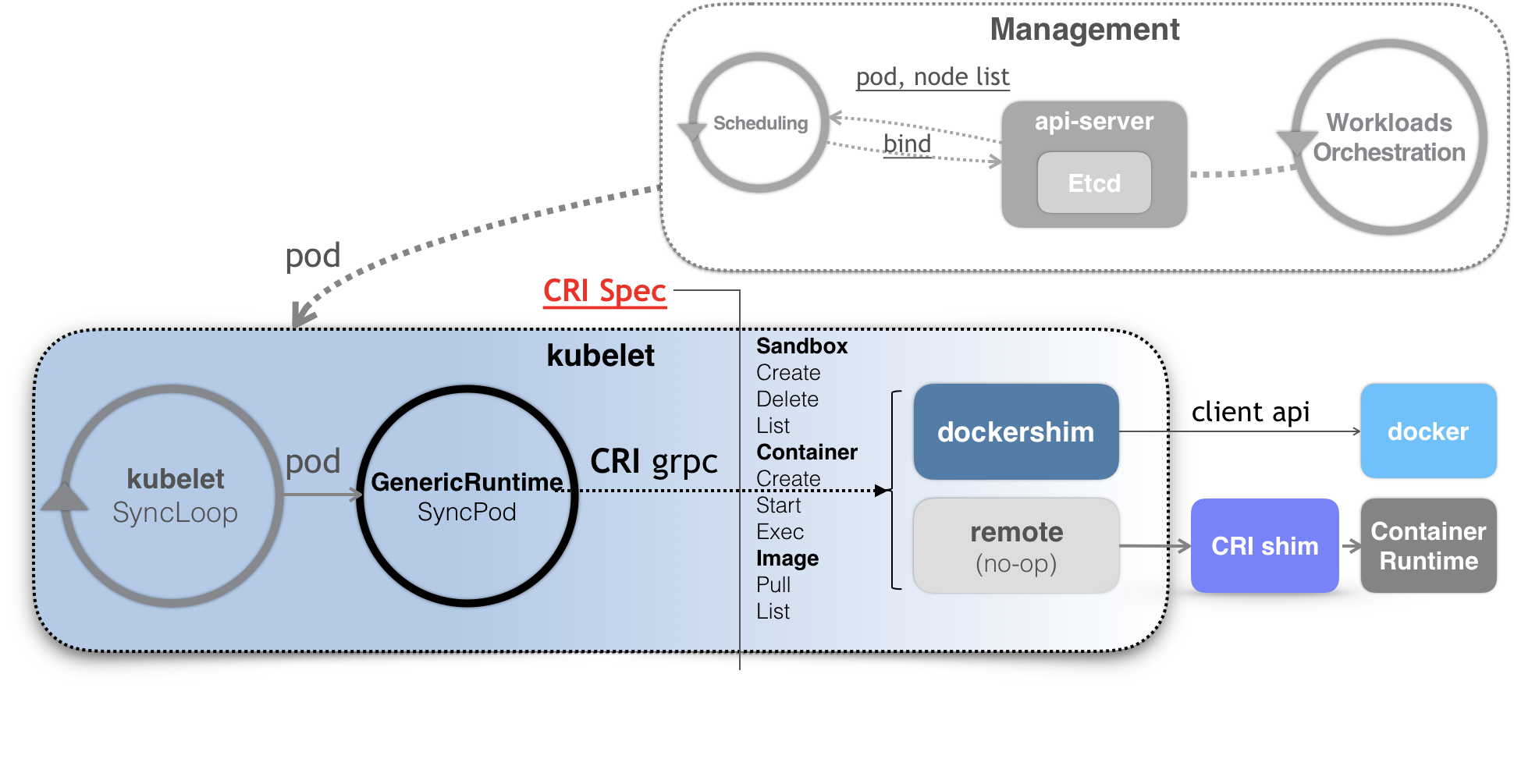
如下图所示,Kubelet是Kubernetes节点上的核心组件,负责管理Pod和容器的生命周期。它是CRI的调用方,通过CRI接口与容器运行时交互。Kubelet通过CRI定义的gRPC接口与容器运行时通信,无需关心底层实现细节。其核心功能包括:
Pod管理:根据API Server下发的Pod配置,创建、更新或删除 Pod。
容器操作:通过CRI接口调用容器运行时,执行容器的创建、启动、停止和删除。
资源监控:收集节点资源使用情况(CPU、内存、存储等)并上报给 API Server。
健康检查:执行容器存活探针(Liveness Probe)和就绪探针(Readiness Probe)。
CRI shim是容器运行时与CRI接口之间的适配层,负责将CRI请求转换为容器运行时能理解的指令。主要有以下三个主要功能:
协议转换:将CRI的gRPC请求转换为容器运行时的原生API(如DockerAPI或containerdAPI)。
兼容性支持:帮助非CRI原生运行时(如早期的Docker)接入k8s。
功能扩展:实现CRI接口的扩展功能(如日志管理、流式执行命令)。
Container Runtime是实际管理容器生命周期的底层引擎,负责创建、运行和销毁容器。主要能力包括根据OCI规范创建容器进程、拉取和存储和删除容器镜像、通过Linux内核功能(cgroups、namespace)实现资源限制和隔离。
这种分层设计实现了k8s与容器运行时的解耦,使得用户可以根据需求灵活选择运行时(如安全容器Kata、轻量级运行时CRI-O),同时保持生态的统一性。
kubelet 与 CRI 交互原理#
整体架构如下图所示,当 k8s 创建一个 Pod 后,就会通过调度器选择一个具体的节点来运行。接着 kubelet 就会通过 SyncLoop 来执行具体的操作。本节主要介绍kubelet与CRI的交互原理。
SyncLoop 是什么?#
SyncLoop 是 kubelet 的工作核心,主要负责 Pod 生命周期的核心控制循环,负责保障 Pod 实际状态与期望状态一致。其核心职责包括:
监控 Pod 状态:持续监听 API Server 的 Pod 配置变更(如创建、更新、删除)。
协调 Pod 状态:根据最新配置,触发 Pod 的创建、更新或删除操作。
处理运行时异常:检测容器崩溃、资源不足等问题,并尝试恢复。
其主要输入的 Channel 包括:
Pod 配置变更(来自 API Server 的 Watch 机制)。
定时同步触发(默认每 10 秒一次,由 sync-frequency 参数控制)。
容器运行时状态更新(如容器退出、镜像拉取失败)。
探针(Probe)结果(如 Readiness/Liveness 检查失败)。
主要逻辑在 syncPod 函数中执行,负责单个 Pod 的状态同步:
(1) 状态对比
对比实际状态和期望状态,期望状态来自 API Server 或静态 Pod 配置文件。实际状态通过容器运行时(如 containerd)查询当前容器状态。
(2) 操作执行
创建 Pod:创建 Pod 的沙箱环境(pause 容器)。按顺序启动 Init 容器和业务容器。挂载 Volume 并设置网络命名空间。
更新 Pod:对比新旧配置差异,仅更新变化的容器或资源(如镜像版本、环境变量)。
删除 Pod:发送 SIGTERM 信号终止容器。等待优雅终止超时后强制终止(SIGKILL)。清理 Volume 和网络资源。
(3) 状态回写
将 Pod 的当前状态(Status)和事件(Event)更新到 API Server,供控制器(如 Deployment Controller)使用。
CRI 规范#
CRI是k8s中用于解耦Kubelet与容器运行时的核心规范,旨在标准化容器生命周期的管理接口。CRI中主要定义了两类接口:
ImageService:定义拉取、查看和删除镜像等操作。
// ImageService defines the public APIs for managing images.
service ImageService {
rpc ListImages(ListImagesRequest) returns (ListImagesResponse) {}
rpc ImageStatus(ImageStatusRequest) returns (ImageStatusResponse) {}
rpc PullImage(PullImageRequest) returns (PullImageResponse) {}
rpc RemoveImage(RemoveImageRequest) returns (RemoveImageResponse) {}
rpc ImageFsInfo(ImageFsInfoRequest) returns (ImageFsInfoResponse) {}
}
RuntimeService:定义容器相关的操作。管理容器的生命周期,以及与容器交互的调用等操作。主要包括 container 和 PodSandbox 相关的管理接口,包括 exec、attach 等。
// ImageService 定义镜像操作接口
service ImageService {
// 拉取镜像
rpc PullImage(PullImageRequest) returns (PullImageResponse) {}
// 列出镜像
rpc ListImages(ListImagesRequest) returns (ListImagesResponse) {}
// 删除镜像
rpc RemoveImage(RemoveImageRequest) returns (RemoveImageResponse) {}
// 其他方法...
}
CRI 生命周期#
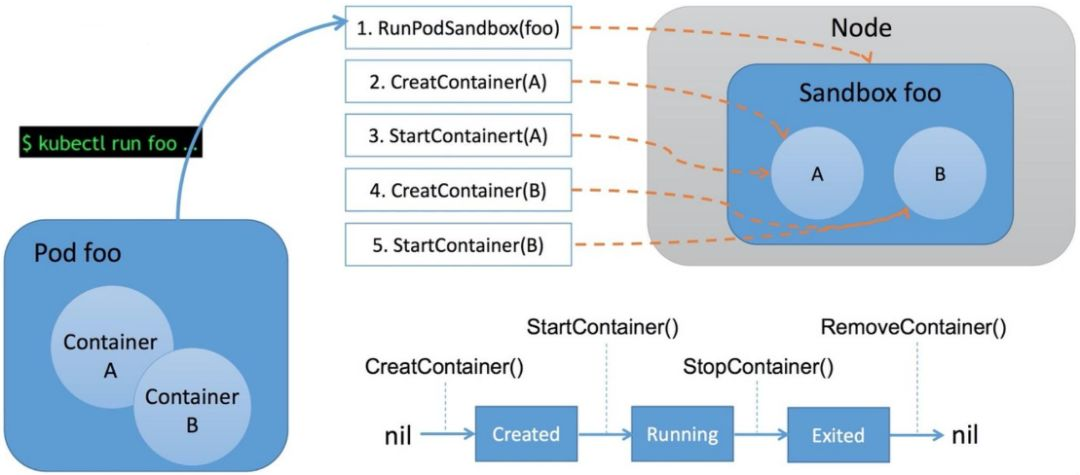
创建一个Pod整体流程如下图所示,通过 kubectl 来运行一个 Pod 时,会执行以下动作:
首先调用 RunPodSandbox 接口来创建一个 Pod 容器,Pod 容器是用来持有容器的相关资源的,比如说网络空间、PID 空间、进程空间等资源。
接着调用 CreatContainer 接口,在 Pod 容器的空间创建业务容器。
然后再调用 StartContainer 接口启动容器。
最后调用 StopContainer 与 RemoveContainer 接口删除容器。
CRI streaming 接口#
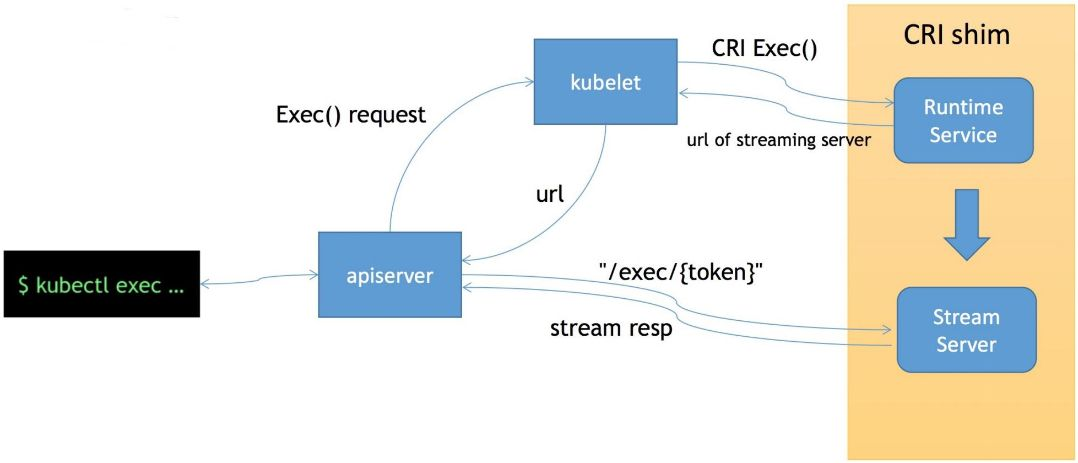
流式接口不仅可以节省资源,还能保证连接的可靠性,调用流程如下图所示。当执行 kubectl exec 命令时,其执行过程如下:
第一步:kubectl 将 exec 请求封装为一个 HTTP 请求,该请求将被 API Server 解析。
第二步:API Server 将请求转发至目标 Pod 所在节点的 kubelet,建立与 kubelet 的 WebSocket 连接,用于实时数据传输。
第三步:kubelet 接收请求后,通过 CRI 与容器运行时交互以执行命令。
为何要设计 CRI shim 这一模块?#
最后再来探讨一个问题,为什么要设计 CRI shim 模块。早期 Kubernetes 最初直接依赖 Docker 的 API 管理容器,导致无法支持其他容器运行时(如 containerd、CRI-O)。还有一点原因就是用户的多样化需求,比如轻量级运行时等。
CRI shim 有哪些优势呢?
解耦核心组件:kubelet 仅需实现 CRI 客户端逻辑,无需为每个运行时编写适配代码。
支持多运行时:支持 Docker、containerd、CRI-O 等。
简化维护
总结与思考#
当前已经支持了 containerd、CRI-O、Docker 等多种主流运行时。未来在安全方面,可以通过沙箱运行时,进一步提升多租户和敏感业务的安全性,同时结合细粒度资源管理,提升资源隔离和安全策略的灵活性。同时在插件化方面,可以进一步推动运行时功能插件化,提供扩展性更强的网络、存储等能力。
参考与引用#
https://www.cnblogs.com/zhangmingcheng/p/17495311.html
https://jimmysong.io/book/kubernetes-handbook/interfaces/cri/