大模型 CKPT 优化手段#
简介#
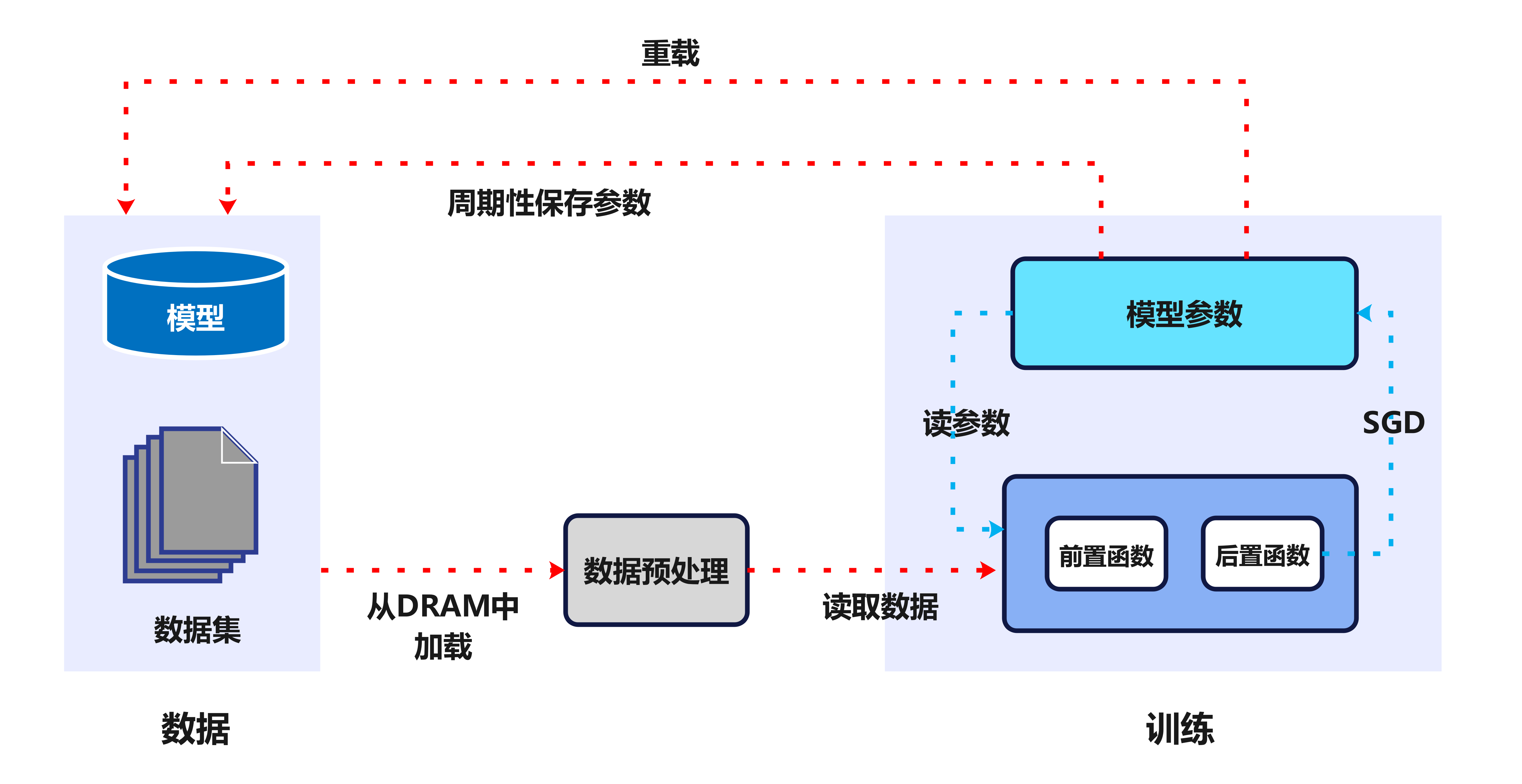
大模型保存模型权重参数(Checkpoint,CKPT)是大模型训练中,在面对硬件故障、系统崩溃、网络断联、冷却不均等问题时,千卡 AI 集群会出现中断导致大模型训练难以持续进行,因此需要通过定期保存模型权重参数来保存和恢复进度。 对于百/千亿参数 LLMs 大模型,CKPT 时间开销从分钟级到小时级不等(CKPT 存储 read/write 耗时与模型大小成正比) 。保存 CKPT 时大模型训练任务需要暂停。
如图,一旦大模型训练过程出现中断,之前迭代的 Epoch 次数在恢复时需要重新计算,通常会花费数小时的时间。大模型训练过程一般使用千卡规模 AI 集群,因此总体损失数千个 NPU 卡时间。
大模型训练过程频繁保存和加载 CKPT 都是个灾难,因此 CKPT 配置的频率,决定了 AI 集群中故障恢复后的重训成本。
原理分析#
大模型参数量大#
大模型参数分为:模型架构参数、优化器参数、损失函数参数等等。
模型架构参数#
模型架构参数指的是模型的基本构成和组成,决定了模型如何处理输入数据并生成输出,主要包括:
神经元数量: 在神经网络中,每个神经元都是一个处理单元,负责接收输入、进行计算并产生输出。神经元的数量直接影响模型的复杂度和学习能力。
层类型: 神经网络由多个层组成,不同类型的层(如卷积层、全连接层、池化层等)具有不同的功能和特性。层类型的选择对模型的性能有重要影响。
激活函数: 激活函数用于在神经网络中引入非线性因素,使得模型能够学习复杂的非线性关系。常见的激活函数包括 ReLU、Sigmoid、Tanh 等。
隐藏层大小和宽度: 隐藏层是神经网络中位于输入层和输出层之间的层,其大小和宽度(即神经元数量)决定了模型能够学习到的数据内在关系的复杂程度。
注意力数量: 在基于 Transformer 的大模型中,注意力头是一种并行注意力机制,用于捕捉更多的并行化关系。注意力头的数量越多,模型能够同时关注的信息就越多。
优化器参数#
优化器是一种调整模型权重的算法。其参数决定了优化器如何根据损失函数来更新权重。主要包括:
学习率: 学习率决定了权重更新的步长,过大的学习率可能导致模型无法收敛,而过小的学习率则可能导致训练过程过于缓慢。
动量: 动量是一种加速梯度下降的策略,它模拟了物理中的动量概念,帮助模型在相关方向上加速收敛,并抑制震荡。
损失函数参数#
损失函数用于衡量模型预测与真实值之间的差距,其参数决定了大模型的训练速度和性能。主要包括:
权重: 在某些损失函数中,可以对不同类型的误差赋予不同的权重,以强调某些方面的性能。
温度参数: 在交叉熵损失等函数中,温度参数可以控制模型预测分布的平滑程度,影响模型对不确定性的处理能力。
保存时机不同导致不同策略带来的时间消耗不同#
以上参数,对于业界正在流行的大模型来说,均是 B 级别(Billion,百万)级别。因此参数需要切分到不同 NPU,每个 NPU 有独立的模型权重参数。如图过程如下。
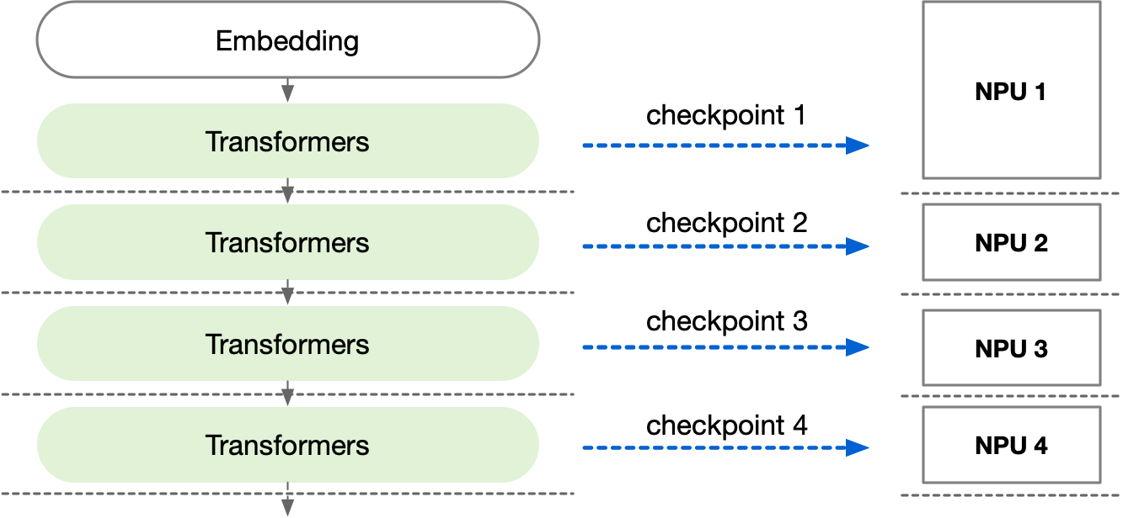
保存: 保存一次完整 CKPT 需要聚合所有 NPU 的权重信息,然后再回传对象存储服务器。
写入: 加载一次 CKPT 需要把聚合后的模型权重按照 AI 集群分布进行切分,逐个 NPU 加载。
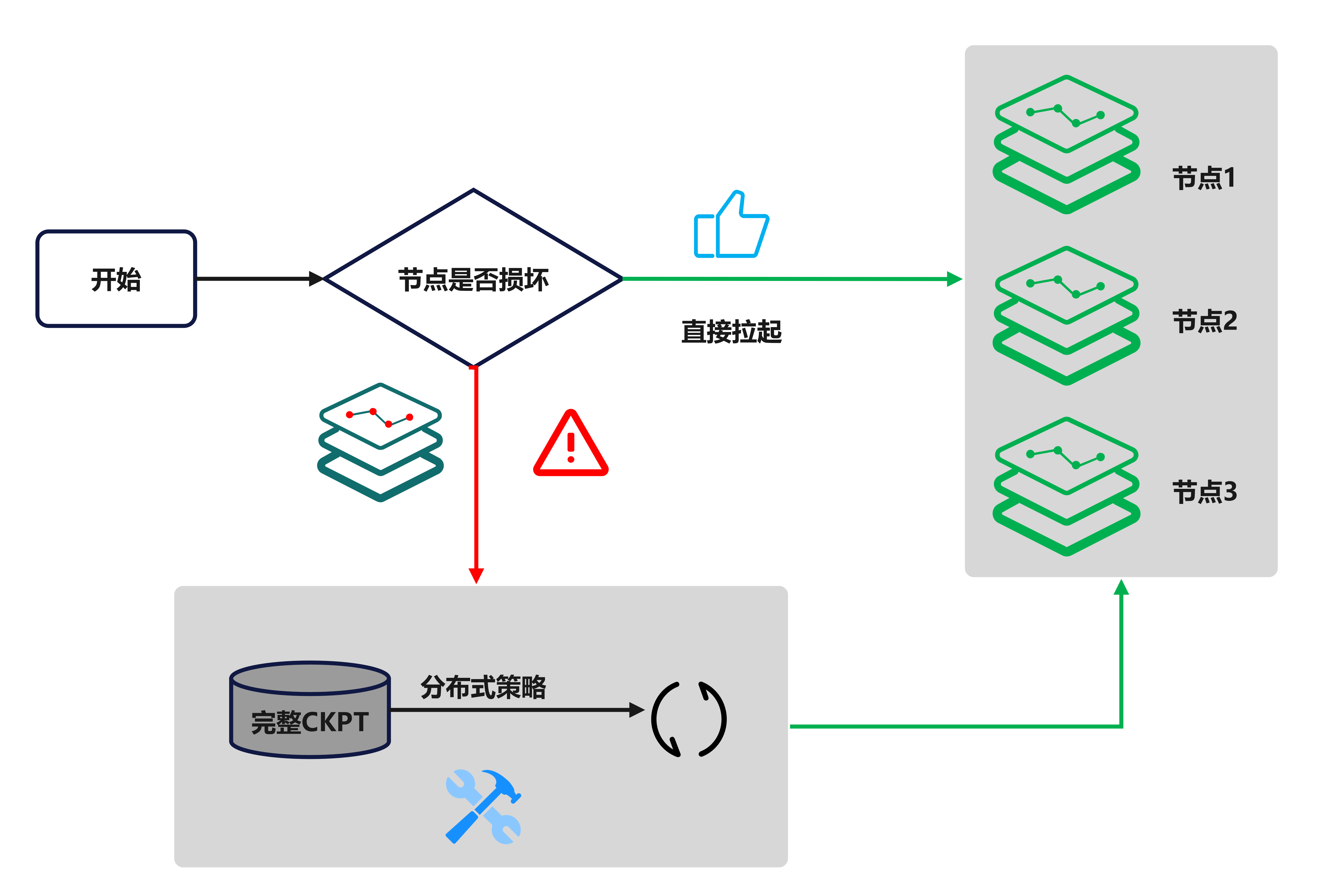
切分与恢复: 如图,数据湖保存分片的 CKPT 和完整的 CKPT。程序定期保存分片 CKPT,定期汇聚分片 CKPT。如果没有节点坏掉,中断恢复直接拉起分片存储的 CKPT,便于加载;如果节点坏掉,使用完整的 CKPT 根据新的分布式策略进行切分后重新拉起。
优化方案#
如图展示了常规大模型训练计算与存储之间关系,这就造成了资源的闲置。现有如下优化方案。

1.存储 CKPT 至数据湖中#
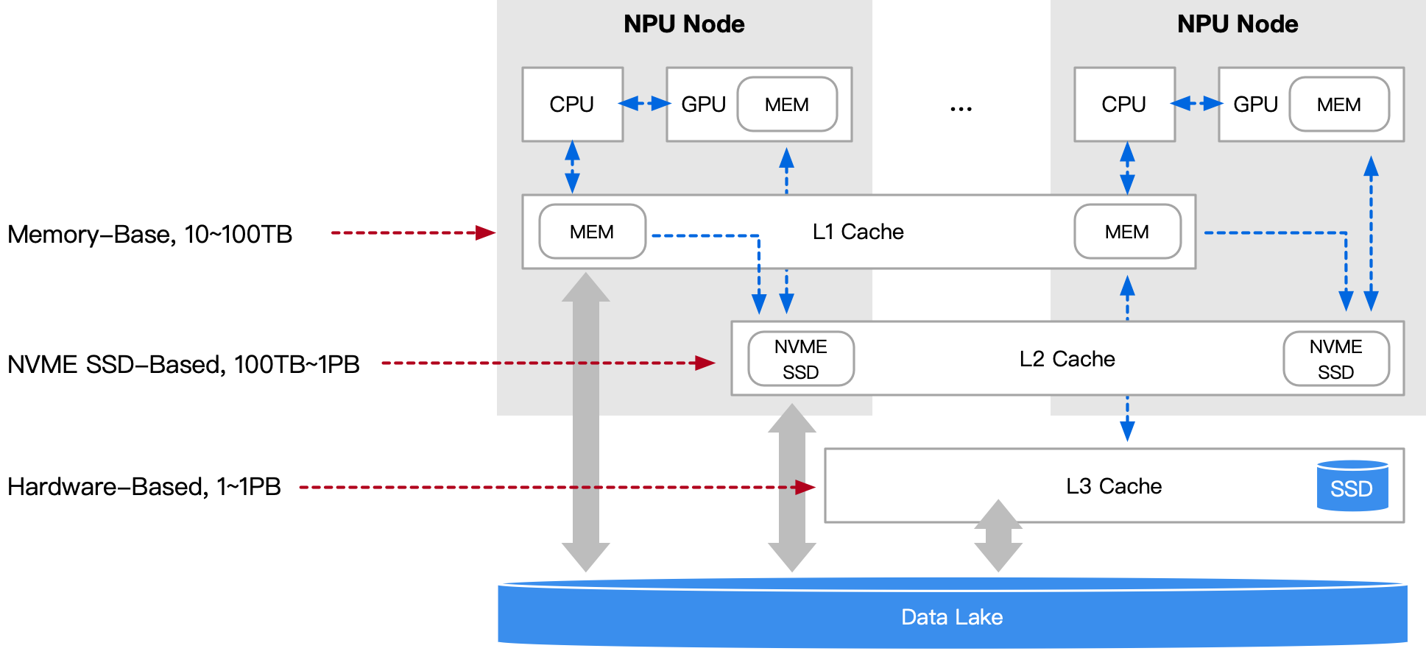
单节点:每个训练节点使用更快的 NVME SSD 代替 HDD 进行存储,再分层回传数据湖;
多节点:一个节点挂了,其 CKPT 被其他节点代替继续进行训练; 优点:大容量、高吞吐、数据可共享
2.CKPT 的保存过程从同步改成异步#
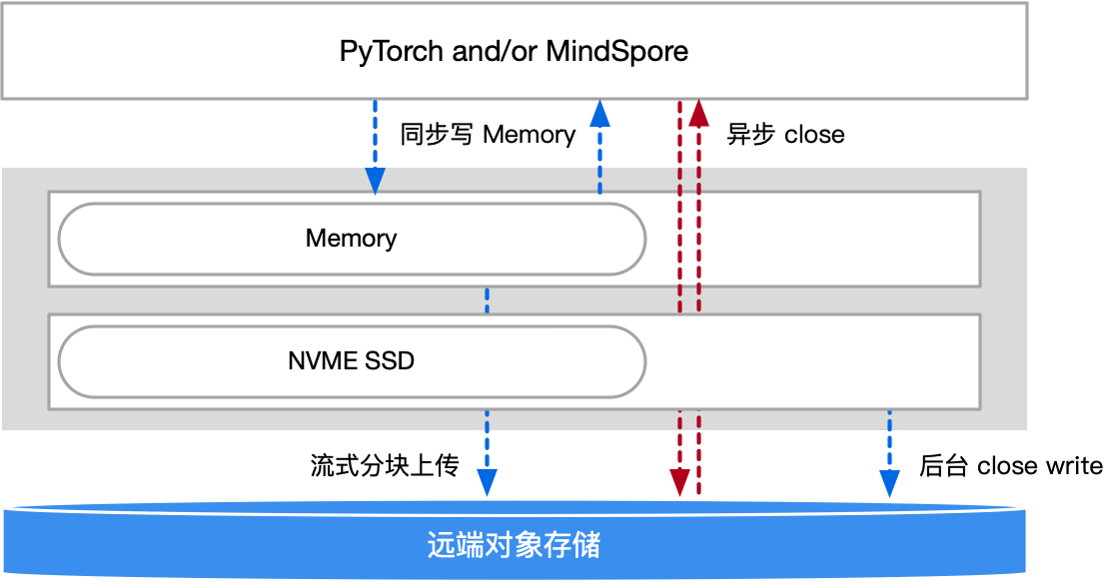
方式:将 save() 过程与下一轮的训练迭代并行,计算掩盖存储耗时。
问题:系统崩溃、节点挂掉时需要处理数据部分写入逻辑。
方案:CKPT 添加 success 标记位便于恢复
3.CKPT 的流式分块存储#
方式:流式和分块上传,无需等 Checkpoint 全部写完到 Memory/SSD 就开始向数据湖上传。
问题:系统崩溃、节点挂掉时需要处理数据部分写入逻辑。
方案:CKPT 添加 success 标记位便于恢复。
4.多文件加速聚合#
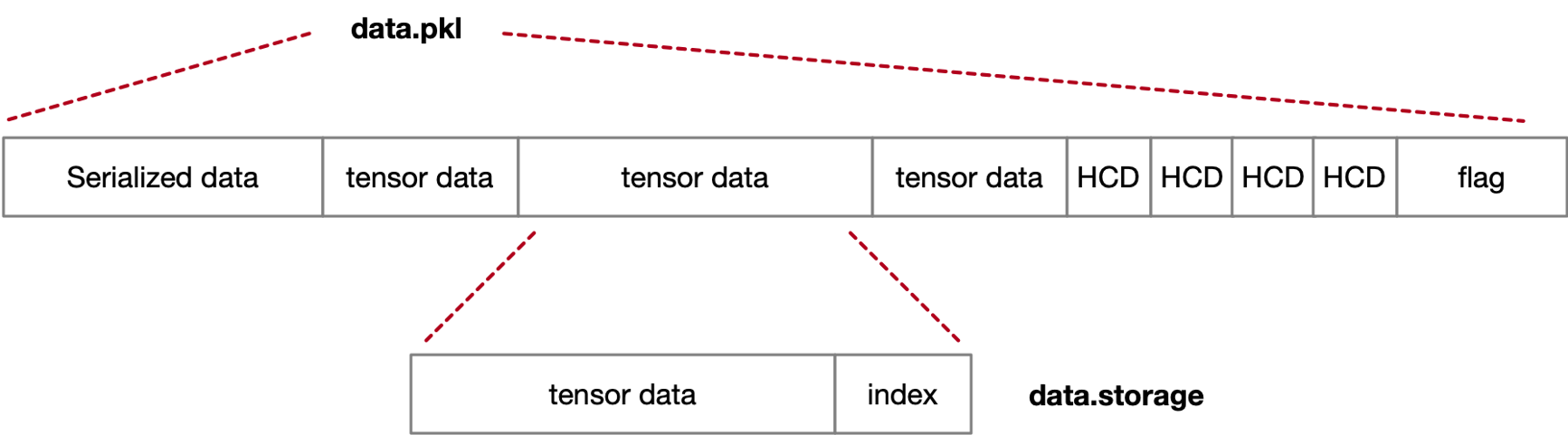 torch.save() 将多个 tensor 分别写入各自文件 idx,对 meta data 要求高,写入开销大。
重写 torch.save()/load() 方法定义数据存储流程,聚合多个 tensor 数据文件;为了 load 过程中数据读取,保留每份数据的索引 index。
torch.save() 将多个 tensor 分别写入各自文件 idx,对 meta data 要求高,写入开销大。
重写 torch.save()/load() 方法定义数据存储流程,聚合多个 tensor 数据文件;为了 load 过程中数据读取,保留每份数据的索引 index。
5.本地内存缓存,同步写内存#
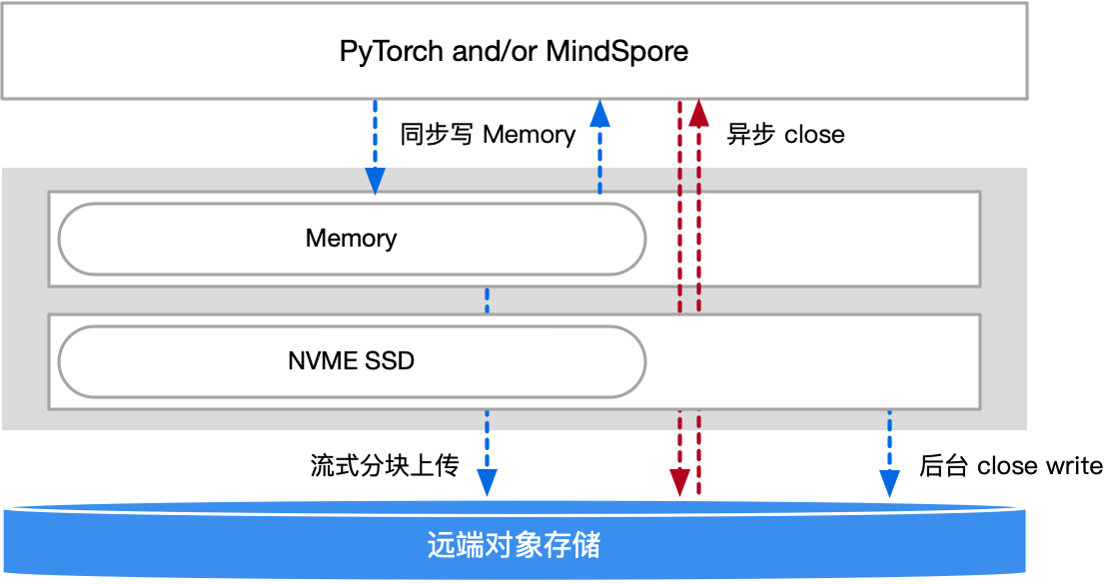 对于 Latest Checkpoint 采用异步写的同时,CKPT save() 时驻留在 CPU 内存,当训练需要恢复时 load() 直接读取,再从数据湖中读取备份到内存,解决 Checkpoint 快速加载问题
对于 Latest Checkpoint 采用异步写的同时,CKPT save() 时驻留在 CPU 内存,当训练需要恢复时 load() 直接读取,再从数据湖中读取备份到内存,解决 Checkpoint 快速加载问题
6.数据拷贝过程使用零拷贝#
通过操作系统的内核技术,实现用户 buffer 间的数据传递,达到数据零拷贝、内存节省的目的。此时 CKPT 数据要求存放在节点内存中
7.量化压缩#
如图,这是包含量化压缩过程的保存模型权重参数的流程图。
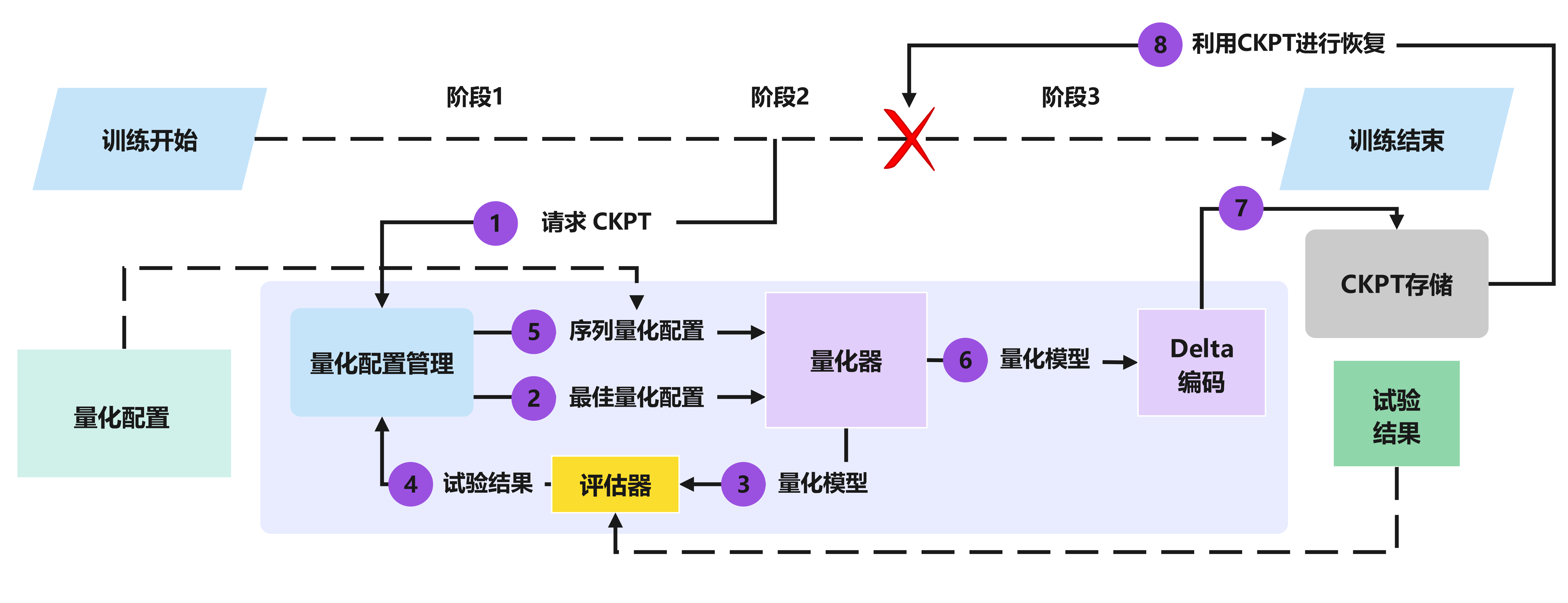 首先,在接到保存 CKPT 的需求时,量化配置管理器执行分布式搜索以识别最佳量化配置。接下来,量化器使用识别的配置压缩模型。评估器将试验结果回传至量化配置管理器中,然后管理器继续序列化配置回传至量化器中迭代,得到量化模型,Delta 编码器利用感知量化的增量压缩技术进行无损压缩,然后将 CKPT 存储起来。最后,增量编码器处理 CPU 内存中的压缩检查点。
首先,在接到保存 CKPT 的需求时,量化配置管理器执行分布式搜索以识别最佳量化配置。接下来,量化器使用识别的配置压缩模型。评估器将试验结果回传至量化配置管理器中,然后管理器继续序列化配置回传至量化器中迭代,得到量化模型,Delta 编码器利用感知量化的增量压缩技术进行无损压缩,然后将 CKPT 存储起来。最后,增量编码器处理 CPU 内存中的压缩检查点。
量化器:给定特定的量化配置,它能将所有模型参数相应地分为三类:修剪(如果低于修剪阈值,则设置为零)、保护(如果高于保护阈值,则保持完全精度)或量化(应用非均匀量化)。主要使用一种非均匀量化方案,主要使用敏感度感知的近似 K-Means 聚类,其中量化粒度由 K-Means 确定。与传统方法相比,该方法提供了更好的量化模型,并且减少了运行时开销,并允许任意数量的量化,灵活度很高从。
Delta 编码:利用连续检查点之间的相似性,使用感知量化的增量压缩来执行无损压缩,。增量编码器采用了一种新颖的参数重排技术,实现了有效的行程编码,将存储开销减少了高达两个数量级。在增量压缩和运行长度编码之后,以组合字节流格式对模型参数进行编码。