Ring Attention#
Author by: 付溦崴
随着模型参数量与序列长度的急剧增长,单一维度的并行手段已无法满足训练需求。由此,研究者们提出了 张量并行(Tensor Parallelism, TP) 与 序列并行(Sequence Parallelism, SP) 等策略来突破限制。本节将介绍
Ring Attention 将一段序列放到多张卡上进行计算,每张卡保存 \(Q\)、\(K\)、\(V\) 矩阵的一部分,通过环状通信在多卡之间发送/接受新的 \(K\)、\(V\) 矩阵 block,达到更新注意力输出的目的。Ring Attention 除了对 Attention 进行多卡分块计算,还将 FFN 层进行多卡分块计算,因此 Ring Attention 本质上就是分布式版本的 BPT(Blockwisew Parallel Transformers),可以简单地将两者与 Flash Attention2 的关系理解为:Flash Attention2->BPT(Flash Attention2 + 分块 MLP)->Ring Attention(分布式版本的 BPT)。
Attention 分块计算#
我们假设 \(Q\)、\(K\)、\(V\) 矩阵的尺寸均为(N,d),其中 N=seq_len,d=hidden_size,为简单起见,我们将序列切分为 4 个 chunk(假设我们有 4 张卡,每张卡负责一个 chunk),每个 chunk 大小为(C,d),如下图所示:
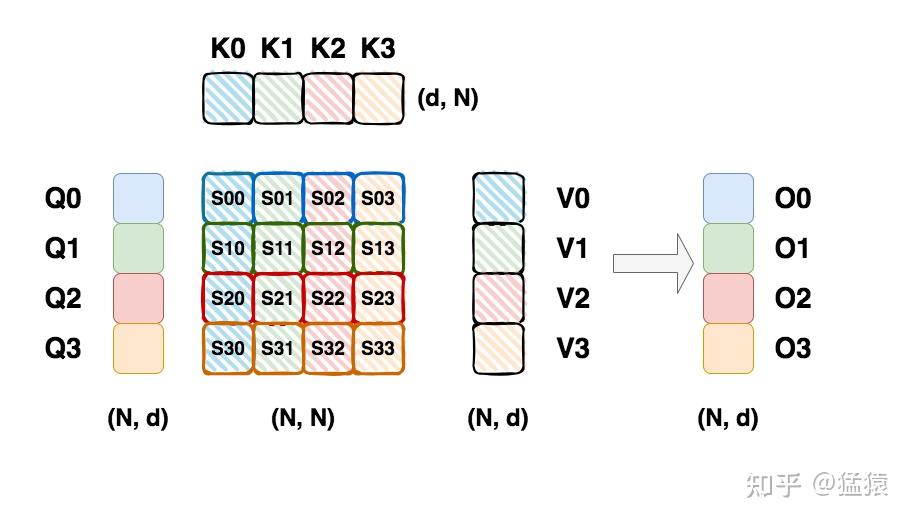
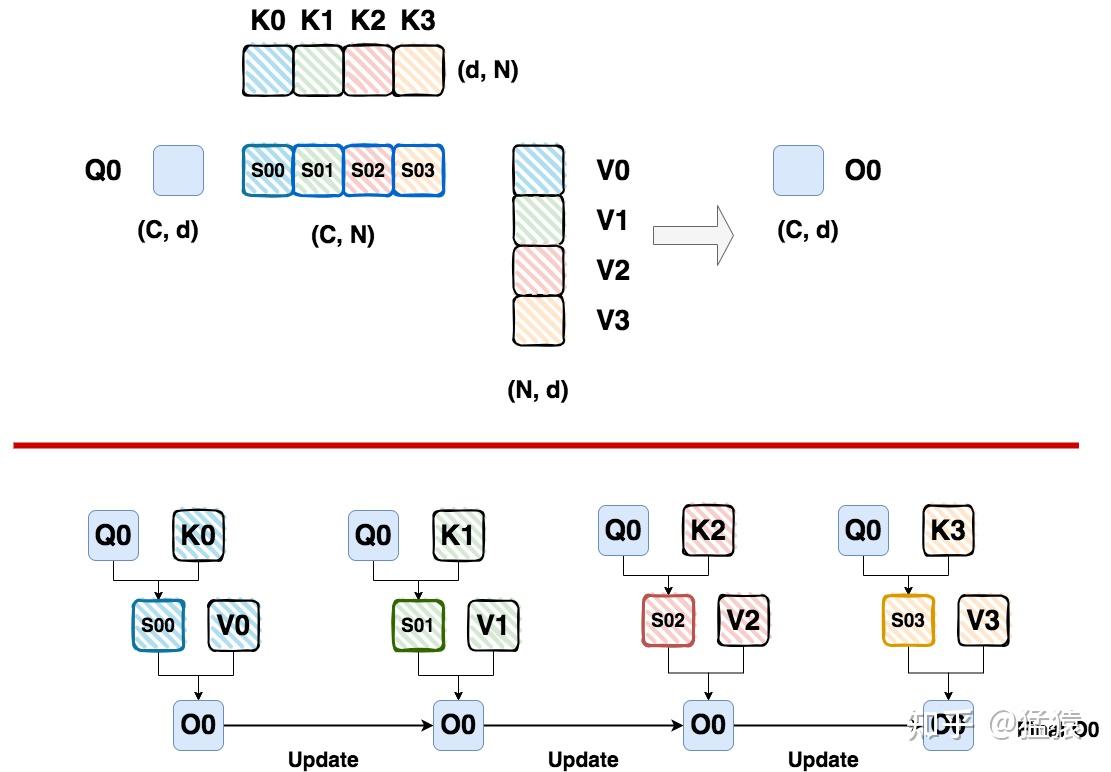
每个块的注意力输出 \(O_i\) 需要用到 \(Q_i\) 矩阵(1 个 chunk)和所有的 \(K\) 矩阵和 \(V\) 矩阵(所有 chunk),因此在多卡计算的时候每张卡的 \(Q_i\) 是固定的。在每块 GPU 上的计算流程是:
传入 \(K_j\) 以及 \(V_j\);
计算 \(Q_i\) 与 \(K_j\) 的注意力分数 \(S_{i,j}\);
计算 \(S_{i,j}\) 与 \(V_j\) 的矩阵乘法,得到 \(O_i^j\);
传入其他 \(K\)、\(V\) 矩阵的 chunk,重复上述过程,更新得到最后的 \(O_i\)。
上述过程如下图所示:
这里需要注意的是 \(O_i\) 是如何更新的。由于注意力机制需要对注意力分数矩阵做 softmax,因此我们需要获得分数矩阵每行的全局最大值以及 sum,记作 global max 和 global sum,但我们在分块计算的过程使用是 local max 以及 local sum。Ring Attention 更新 \(O_i\) 的方式与 Flash Attention2 基本一致。
多 GPU 环状通信#
上面的分块流程已经提及,每次计算得到的 \(O_i^j\) 只需要用到 \(K_j\) 以及 \(V_j\),因此每张 GPU 仅仅保留对应需要的 chunk,在下一次更新 \(O_i^{j+1}\) 的时候需要从其他卡接收 \(K_{j+1}\) 以及 \(V_{j+1}\),这样就能够达到节约显存的目的。不过需要注意的是,这个过程会增加通信量,因此需要设计合理的 chunk size,使得计算与通信的时间相互遮盖。下面是环状通信的流程:
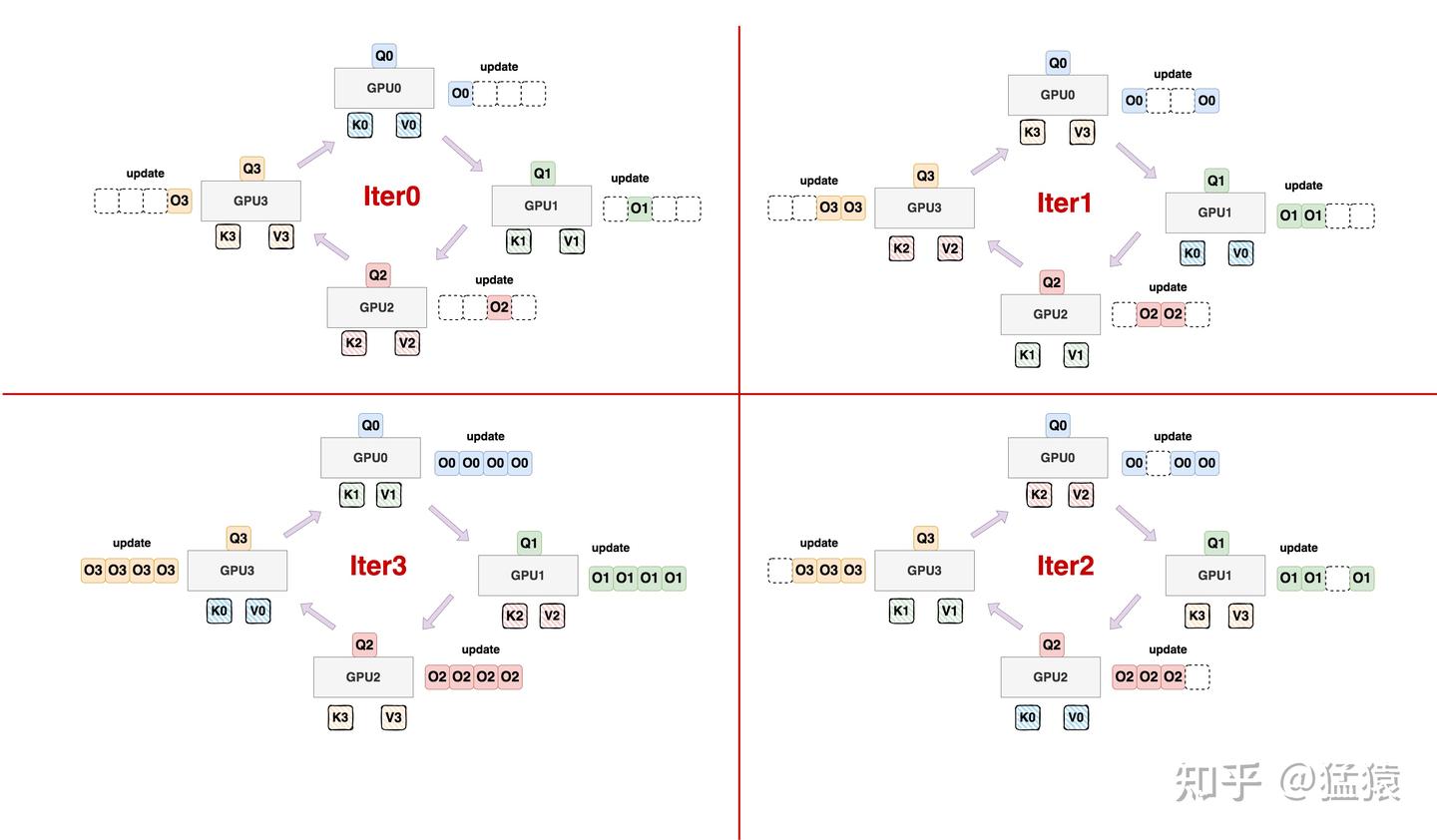
首先将 \(Q\) 分块放置到每张 GPU 内,各卡上的 \(Q\) 分块不变;
接着,每块卡上只放一块 \((K,V)\) 对。也就是每次计算时,哪个 \((K,V)\) 对需要被这块卡用到,哪个 \((K,V)\) 对就在这块卡上放着。初始化的状态如图 iter0 所示;
接着,在每块卡使用当前 \((K,V)\) 对做 Attention 计算时:
接收来自前一块卡的 \((K,V)\) 对,并把自己当前维护的 \((K,V)\) 对发给下一张卡,形成一个环状通信拓扑
例如,当 GPU0 正在使用 \((K_0,V_0)\) 进行计算时,它接收来自 GPU3 的 \((K_3,V_3)\) ,同时把自己的 \((K_0,V_0)\) 发送给 GPU1,其余卡也是类推。
在我们的图中,为了更好表示这一个更新过程,对于某个 \(O_i\) 我们画出了若干个,但正如上文所说,实际运行时我们只维护一个 \(O_i\) 并不断更新它。这里画出多个 \(O_i\) 只是更好帮助大家理解。
显存分析#
这里不考虑 FFN 层分块的影响,仅对 Attention 显存占用进行分析,精度假设为 bf16:每张卡需要保存一个 \(Q_i\),\(K_j\),\(V_j\) 来计算当前的 \(O_i^j\),占用 6Cd bytes;还需要保存获取从前一张 GPU 上获取的 \(K_{j-1}\)、\(V_{j-1}\) 占用 4Cd bytes;计算更新过程中需要保存当前的 \(O_i^j\) 占用 2Cd bytes,因此总共占用 12Cd bytes。
Chunk Size 设置#
为了不影响效率,设置的原则是【传输时间 <= 计算时间】,这样才可以让这部分开销被计算覆盖住,进而不影响整个系统的计算效率。而要做到这一点,就需要我们根据所使用的卡的配置,设计好最优的分块大小,也就是上图中所说的 C(chunk size),用于表示一个分块中包含多长的序列。为了表达简便,我们在做各种指标计算时忽略掉 batch_size 维度。
我们假设:
硬件(例如单张 GPU)的算力上限是 F,单位是 FLOPS 或者 FLOP/s。
硬件的带宽上限是 B,单位是 Byte/s。
单卡在对每个 chunk 进行计算的时候,计算 Attention score 的计算量为 \(2dC^2\) FLOPs,Attention score 与 \(V\) 矩阵相乘的计算量为 \(2dC^2\) FLOPs,因此 Attention score 的整体计算量为 \(4dC^2\) FLOPs。
传输数据(\(K\),\(V\) 分块)的通信总量为 \(4dC\) bytes。根据【传输时间<=计算时间】的基本要求,我们有: \(\frac{4dC}{B} \leq \frac{4dC^2}{F}\),进一步可得:\(C \geq \frac{F}{B}\),及我们根据硬件的算力和带宽得到的最优切块大小。
上面的推导过程中没有考虑 \(W_Q\),\(W_K\),\(W_V\) 矩阵的映射的计算量,因此对 \(C\) 的要求也是更严格的,因为这意味着要求在 Attention Score 的计算量下完成通信,而不是在实际情况 Attention score + Projection 的计算量下完成通信。
参考链接:
Ring Attention with Blockwise Transformers for Near-Infinite Context