Mamba 状态空间模型(DONE)#
这个实验带你探索超越 Transformer 的下一代架构Mamba。你将动手实现 Mamba 的核心组件——硬件感知的状态空间模型和选择性扫描机制(S6)。通过代码你将看到,Mamba 如何根据输入动态调整模型参数,实现数据依赖的隐藏状态演化,并利用并行算法实现高效的训练推理。
通过该实验,你将直观感受到 Mamba 是如何通过结构化状态空间模型和硬件感知算法优化,在语言、基因等多个长序列建模领域展现出巨大潜力,成为当前最受关注的新架构之一。
1. 状态空间模型 SSM#
近年来,Transformer 架构在深度学习领域取得了巨大成功,但其二次方的计算复杂度限制了其在超长序列任务中的应用。2023 年底提出的 Mamba 模型基于状态空间模型(SSM),通过选择性机制和硬件感知算法,实现了线性计算复杂度,成为处理长序列任务的新范式。
状态空间模型源于控制理论,用于描述动态系统行为。其核心思想是通过隐藏状态来捕捉序列的历史信息,并根据当前输入更新状态。
1.1 环境设置与导入依赖#
import torch
import torch.nn as nn
import torch.nn.functional as F
import math
1.2 连续时间 SSM#
连续时间状态空间模型用微分方程表示:
其中:
\(x(t)\): 输入信号
\(h(t)\): 隐藏状态
\(y(t)\): 输出信号
\(A, B, C, D\): 可学习参数矩阵
1.3 离散化过程#
为了在数字系统中使用,需要将连续方程离散化。Mamba 采用零阶保持(ZOH)方法:
离散化后的方程:
其中 \(\Delta\) 为步长参数,控制状态更新频率。
1.4 基础 SSM 实现#
class BasicSSM(nn.Module):
def __init__(self, state_dim, input_dim):
super().__init__()
# 初始化状态转移矩阵和输入/输出参数
self.A = nn.Parameter(torch.randn(state_dim, state_dim))
self.B = nn.Parameter(torch.randn(state_dim, input_dim))
self.C = nn.Parameter(torch.randn(input_dim, state_dim))
self.D = nn.Parameter(torch.randn(input_dim))
# 控制状态更新频率的步长参数
self.delta = nn.Parameter(torch.tensor(0.1))
def discretize(self):
"""实现零阶保持离散化,将连续参数转换为离散参数"""
A_bar = torch.matrix_exp(self.A * self.delta)
inv_A = torch.inverse(self.A)
A_exp_minus_I = torch.matrix_exp(self.A * self.delta) - torch.eye(self.A.size(0))
B_bar = A_exp_minus_I @ inv_A @ self.B
return A_bar, B_bar
def forward(self, x):
"""循环更新隐藏状态并计算输出"""
A_bar, B_bar = self.discretize()
batch_size, seq_len, _ = x.shape
state_dim = self.A.size(0)
h = torch.zeros(batch_size, state_dim).to(x.device)
outputs = []
for i in range(seq_len):
h = torch.tanh(A_bar @ h + B_bar @ x[:, i, :])
y = self.C @ h + self.D * x[:, i, :]
outputs.append(y)
return torch.stack(outputs, dim=1)
2. Mamba 的核心创新#
传统 SSM 的主要限制是参数固定,无法根据输入内容动态调整。Mamba 通过选择性机制解决了这一问题。
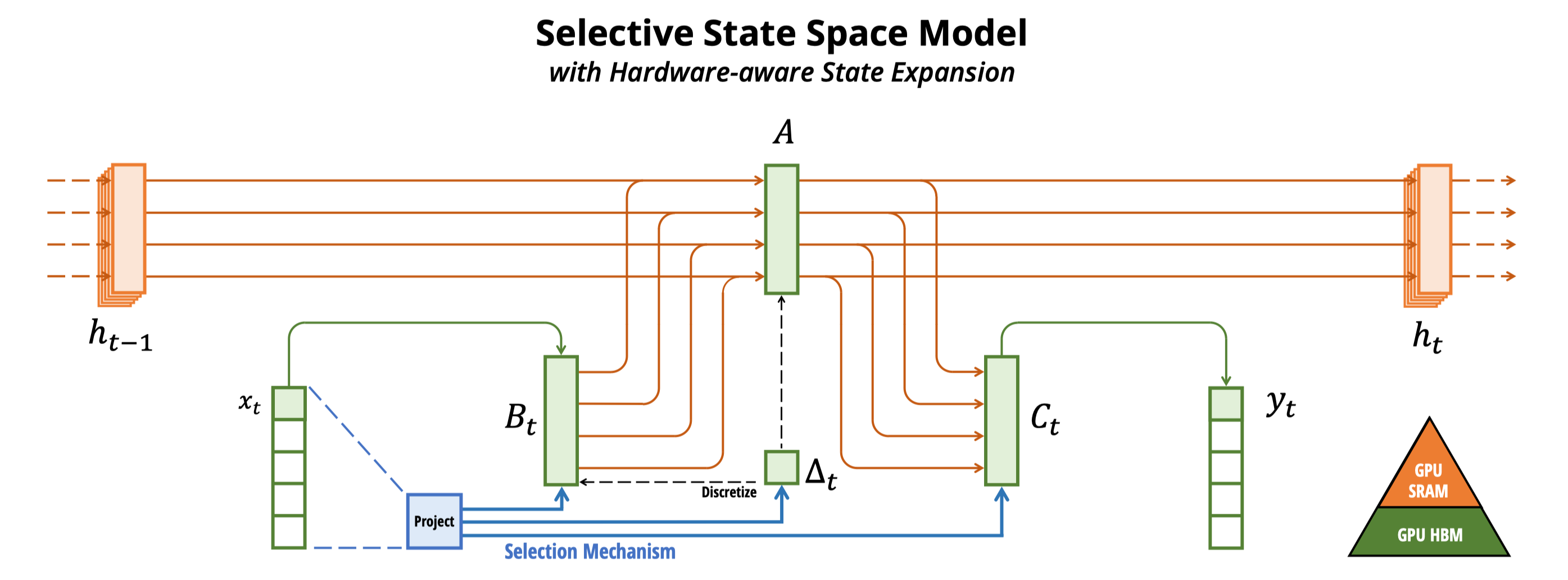
2.1 选择性状态空间模型#
Mamba 的核心创新是使 SSM 参数成为输入的函数:
其中 \(\tau_{\Delta}\) 是一个小型神经网络,根据当前输入 \(x_k\) 预测步长 \(\Delta_k\)。
这种设计使模型能够对重要输入延长记忆(大 \(\Delta\)),对无关输入缩短记忆(小 \(\Delta\))。
2.2 选择性 SSM 实现#
class SelectiveSSM(nn.Module):
def __init__(self, dim, state_dim):
super().__init__()
self.dim = dim # 输入/输出维度(D)
self.state_dim = state_dim # 状态维度(N)
# 投影层生成输入依赖的参数
self.proj = nn.Linear(dim, 3 * dim + state_dim)
self.A = nn.Parameter(torch.randn(dim, state_dim))
self.out_proj = nn.Linear(dim, dim)
def forward(self, x):
batch_size, seq_len, _ = x.shape
projected = self.proj(x)
# 分割为Δ、B、C 和门控信号
delta, B, C, gate = torch.split(
projected, [self.dim, self.dim, self.state_dim, self.dim], dim=-1
)
delta = F.softplus(delta) # 确保Δ为正数
gate = F.silu(gate) # 门控激活
# 计算离散化参数
A_bar = torch.exp(delta.unsqueeze(-1) * self.A)
B_bar = delta.unsqueeze(-1) * B.unsqueeze(-1)
# 循环更新状态并计算输出
h = torch.zeros(batch_size, self.dim, self.state_dim, device=x.device)
outputs = []
for i in range(seq_len):
h = A_bar[:, i] * h + B_bar[:, i] * x[:, i].unsqueeze(-1)
y = (h @ C[:, i].unsqueeze(-1)).squeeze(-1)
outputs.append(y)
output = torch.stack(outputs, dim=1)
return self.out_proj(output) * gate # 应用门控控制
3. 硬件感知算法#
Mamba 的另一个关键创新是硬件感知算法,通过优化内存访问模式在 GPU 上实现高效计算。传统 RNN 需要串行计算,而 Mamba 利用并行前缀和算法实现高效并行计算:
class HardwareAwareScan(nn.Module):
def __init__(self, chunk_size=1024):
super().__init__()
self.chunk_size = chunk_size
def forward(self, A_bar, B_bar, x):
batch_size, seq_len, dim, state_dim = A_bar.shape
# 短序列直接使用串行扫描
if seq_len <= self.chunk_size:
return self.serial_scan(A_bar, B_bar, x)
# 长序列分块并行处理
return self.parallel_scan(A_bar, B_bar, x)
def serial_scan(self, A_bar, B_bar, x):
"""串行状态更新"""
batch_size, seq_len, dim, state_dim = A_bar.shape
h = torch.zeros(batch_size, dim, state_dim).to(x.device)
outputs = []
for i in range(seq_len):
h = A_bar[:, i] * h + B_bar[:, i] * x[:, i].unsqueeze(-1)
outputs.append(h)
return torch.stack(outputs, dim=1)
def parallel_scan(self, A_bar, B_bar, x):
"""分块并行扫描优化内存访问"""
batch_size, seq_len, dim, state_dim = A_bar.shape
num_chunks = math.ceil(seq_len / self.chunk_size)
outputs = []
hidden_state = torch.zeros(batch_size, dim, state_dim).to(x.device)
for i in range(num_chunks):
start = i * self.chunk_size
end = min(start + self.chunk_size, seq_len)
chunk_len = end - start
chunk_A = A_bar[:, start:end]
chunk_B = B_bar[:, start:end]
chunk_x = x[:, start:end]
# 处理当前块
chunk_output = self.process_chunk(chunk_A, chunk_B, chunk_x, hidden_state)
outputs.append(chunk_output)
# 更新隐藏状态传递给下一块
hidden_state = chunk_output[:, -1]
return torch.cat(outputs, dim=1)
def process_chunk(self, A, B, x, h0):
"""处理单个块内的状态更新"""
batch_size, chunk_len, dim, state_dim = A.shape
h = h0.clone()
outputs = []
for i in range(chunk_len):
h = A[:, i] * h + B[:, i] * x[:, i].unsqueeze(-1)
outputs.append(h)
return torch.stack(outputs, dim=1)
4. 执行实验与结果分析#
4.1 整体 Mamba 代码#
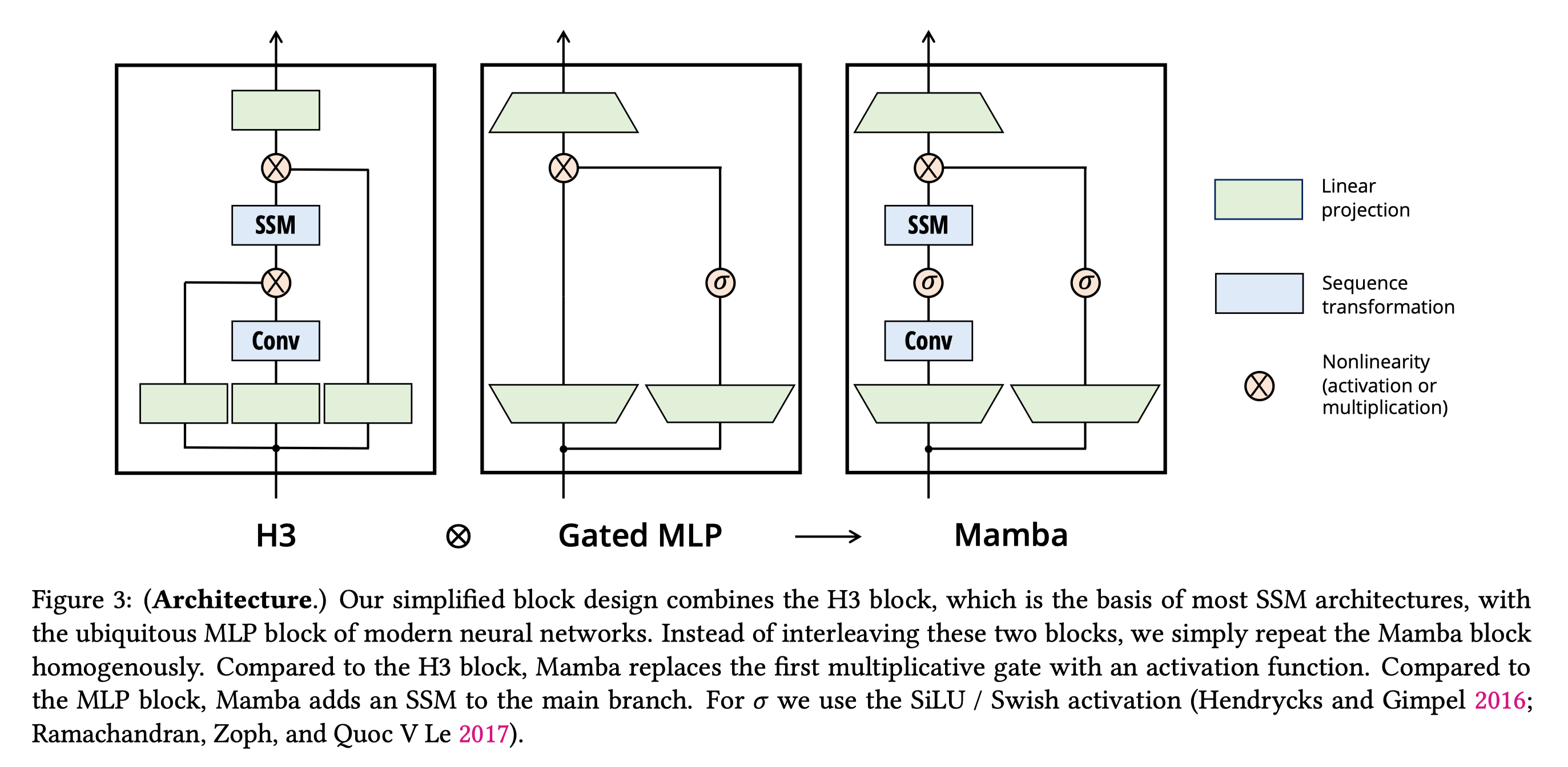
class MambaBlock(nn.Module):
def __init__(self, dim, state_dim=16):
super().__init__()
self.dim = dim
self.state_dim = state_dim
# 输入投影分离门控和特征路径
self.in_proj = nn.Linear(dim, 2 * dim)
# 卷积层捕捉局部特征
self.conv = nn.Conv1d(dim, dim, kernel_size=3, padding=1)
# 选择性 SSM 处理全局依赖
self.ssm = SelectiveSSM(dim, state_dim)
# 输出投影
self.out_proj = nn.Linear(dim, dim)
def forward(self, x):
batch_size, seq_len, _ = x.shape
# 分离门控和特征路径
x_proj = self.in_proj(x)
gate, x = torch.split(x_proj, [self.dim, self.dim], dim=-1)
gate = F.silu(gate)
# 卷积处理局部特征
x_conv = self.conv(x.transpose(1, 2)).transpose(1, 2)
x_conv = F.silu(x_conv)
# 选择性 SSM 处理序列依赖
x_ssm = self.ssm(x_conv)
# 门控融合和残差连接
output = self.out_proj(x_ssm * gate)
return output + x # 残差连接稳定训练
4.2 简单复制任务测试#
def test_copy_task():
"""测试模型记忆和复制序列的能力"""
dim, state_dim, seq_len, batch_size = 32, 16, 100, 4
model = MambaBlock(dim, state_dim)
input_seq = torch.randn(batch_size, seq_len, dim)
output = model(input_seq)
print(f"输入形状: {input_seq.shape}, 输出形状: {output.shape}")
print(f"参数数量: {sum(p.numel() for p in model.parameters()):,}")
# 估计计算量(FLOPs)
flops = estimate_flops(model, input_seq)
print(f"估计 FLOPs: {flops / 1e6:.2f} M")
return output
def estimate_flops(model, input_seq):
"""计算模型前向传播的浮点运算量"""
batch_size, seq_len, dim = input_seq.shape
state_dim = model.ssm.state_dim
# 各组件 FLOPs 计算
in_proj_flops = batch_size * seq_len * dim * (2 * dim)
conv_flops = batch_size * seq_len * dim * (dim * 3)
ssm_proj_flops = batch_size * seq_len * dim * (3 * dim + state_dim)
state_update_flops = batch_size * seq_len * 2 * dim * state_dim
ssm_out_flops = batch_size * seq_len * dim * dim
return in_proj_flops + conv_flops + ssm_proj_flops + state_update_flops + ssm_out_flops
output = test_copy_task()
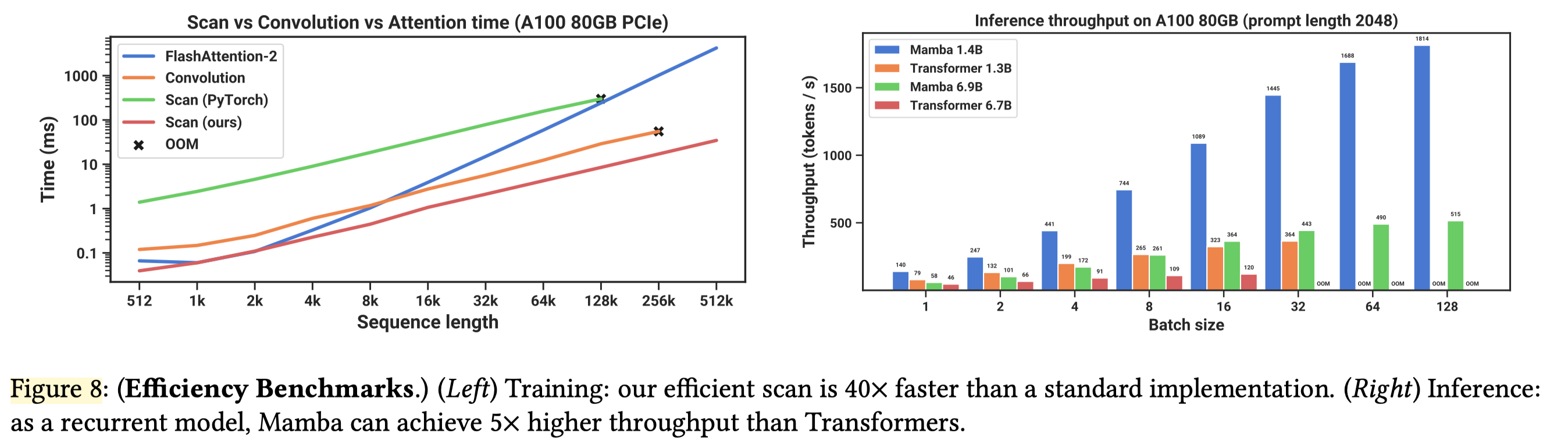
4.3 与 Transformer 对比#
def compare_with_transformer():
"""对比 Mamba 和 Transformer 在长序列下的性能"""
dim, seq_len, batch_size = 32, 1000, 4
mamba_model = MambaBlock(dim)
transformer_layer = nn.TransformerEncoderLayer(dim, nhead=4)
input_seq = torch.randn(batch_size, seq_len, dim)
# 测量内存使用
with torch.no_grad():
mamba_output = mamba_model(input_seq)
mamba_memory = torch.cuda.max_memory_allocated() if torch.cuda.is_available() else 0
if torch.cuda.is_available():
torch.cuda.reset_peak_memory_stats()
transformer_output = transformer_layer(input_seq.transpose(0, 1))
transformer_memory = torch.cuda.max_memory_allocated() if torch.cuda.is_available() else 0
# 计算复杂度对比
mamba_flops = estimate_flops(mamba_model, input_seq)
transformer_flops = 4 * seq_len * seq_len * dim # 自注意力二次方复杂度
print(f"序列长度: {seq_len}")
print(f"Mamba 内存: {mamba_memory/1024**2:.2f} MB, Transformer 内存: {transformer_memory/1024**2:.2f} MB")
print(f"Mamba FLOPs: {mamba_flops/1e6:.2f} M, Transformer FLOPs: {transformer_flops/1e6:.2f} M")
print(f"复杂度比率: {transformer_flops/mamba_flops:.2f}倍")
compare_with_transformer()
5. 总结与思考#
本实验实现并验证了 Mamba 状态空间模型的核心组件,其依托选择性机制与硬件感知算法,实现线性计算复杂度,适配长序列任务。
Mamba 具备三大优势:线性复杂度适用于 DNA、高分辨率图像等长序列场景,动态记忆能依输入调整状态演化以提升语义理解,硬件友好性使算法与 GPU 内存特性深度协同;但也存在局限,如短文本效果略逊 Transformer、需专用 CUDA 内核实现最佳性能、训练数据需求比 Transformer 多。